Task Description
Interaction behaviors wanted
- Radio’s body is physically reacting to the environment and gravity
- Radio’s antenna should rotate in a cone-shaped joint range (using VG_Articulation cone joint).
- Radio’s two knobs are to be rotated like as a revolute joint with certain angular range (using VG_Articulation revolute joint).
- When one hand grasp the radio body, the other hand should be able to easily grasp knobs (NOTE this is a challenging object selection problem when a smaller object like knobs are close with a bigger radio object).
- Can dissembling the antenna and two knobs from the radio body when hand grasping on them and pulling farther away.
- After the antenna or two knobs are dissembled, they should also physically react to the environment and gravity.
- Can assemble the disassembled parts back to the radio.
Solution
In VirtualGrasp SDK, we packed the solution of this task in VirtualGrasp\Scenes\onboarding.
VirtualGrasp\Scenes\onboarding\VG_Onboarding.unity
Disassemble and re-assemble knobs and antenna
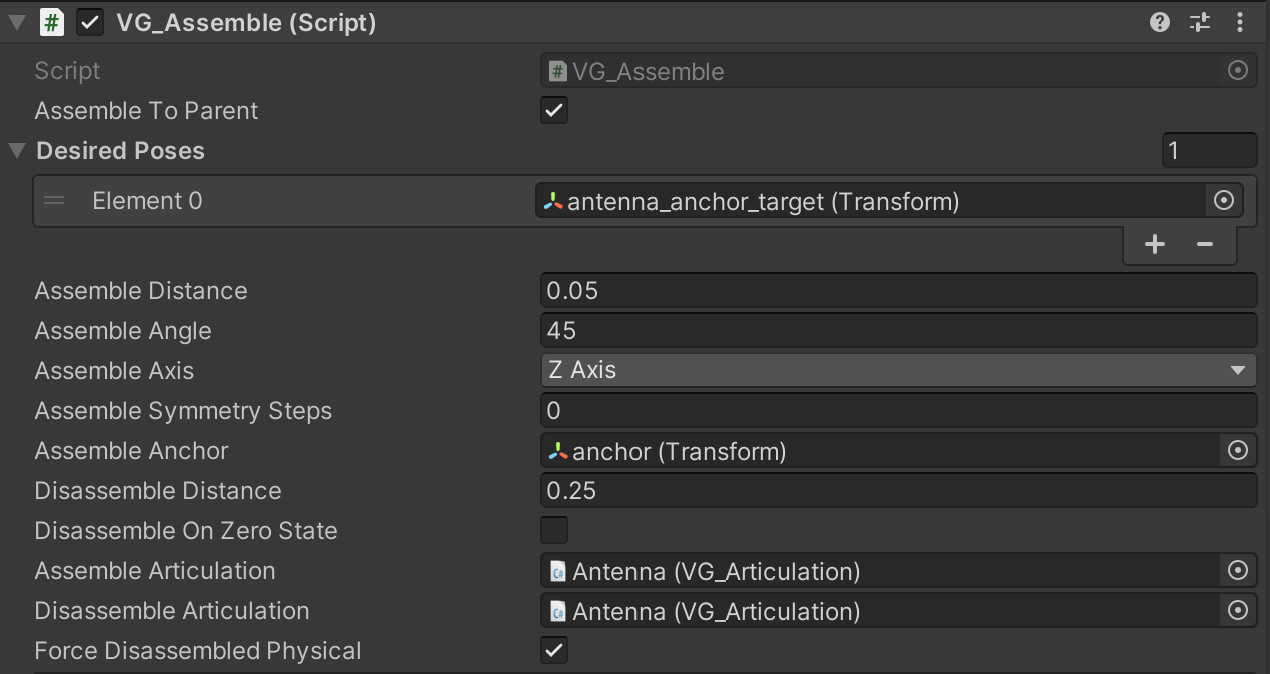
VG_Assemble component is used for disassembling and re-assembling the two knobs and the antenna from the radio. Above image shows the setting for the component on antenna. A few things to point out:
- Since when we re-assemble the antenna to the radio, we want the antenna to attach to radio as radio’s child, we check Assemble To Parent flag.
- And Desired Poses is antenna_anchor_target transform that is radio’s child.
- Since the antenna is a rotational symmetric object, so assemble angle threshold just need to make sure this symmetry axis is aligned with the desired pose. This axis is represented by the Z Axis of the assigned Assemble Anchor anchor transform, therefore Assemble Axis is set to be “Z Axis” indicating z-axis of anchor should match that of antenna_anchor_target. Since any rotation angle around the axis is fine, Assemble Symmetry Steps is set to be 0.
- Because the antenna initially is at the assembled state (attached to the radio with cone joint), we need to add a disabled VG_Articulation with floating joint to this game object and drag it to Disassemble Articulation entry. (If an object initially is floating joint type, this is not needed.)
- Since initially the antenna is attached to the radio with a constrained joint type – cone joint, the object can not be physical. Therefore if we want the object to become physical when it is disassembled, we need to check Force Disassembled Physical flag.
Change selection weight to make knobs easily selected
//VirtualGrasp\Scenes\onboarding\Scripts\ChangeSelectionWeight.cs:
using UnityEngine;
using VirtualGrasp;
/**
* ChangeSelectionWeight shows as a tutorial on how to runtime change object
* selection weight to affect how easy an object can be selected for interaction with VG.
*/
public class ChangeSelectionWeight : MonoBehaviour
{
public Transform m_dependent_object;
public float m_releasedWeight = 1.0f;
public float m_graspedWeight = 20.0f;
void Start()
{
VG_Controller.OnObjectFullyReleased.AddListener(ObjectReleased);
VG_Controller.OnObjectGrasped.AddListener(ObjectGrasped);
if (m_dependent_object == null)
m_dependent_object = transform.parent;
}
void ObjectReleased(VG_HandStatus hand)
{
if (hand.m_selectedObject == m_dependent_object)
VG_Controller.SetObjectSelectionWeight(transform, m_releasedWeight);
}
void ObjectGrasped(VG_HandStatus handStatus)
{
if (handStatus.m_selectedObject == m_dependent_object)
VG_Controller.SetObjectSelectionWeight(transform, m_graspedWeight);
}
}
is the script showing how to use API function SetObjectSelectionWeight to tune up and down the selection weight in runtime. This script is attached to the two knobs, and the main radio body would be m_dependent_object; as a result, once the radio is grasped by one hand, the selection weight of the two knobs will be tuned up to m_graspedWeight so that the knobs can be easily selected for grasping by the other hand. The logic may not be perfect, however the main goal in this script is to show the use cases of selection weight.
Note, in this example, even when we don’t tune up selection weights on the knobs, the selection still works well.