Background
To create immersive interactive experiences in a virtual environment is difficult because physical constraints and haptic sensations can not be fully reproduced with today’s VR software and hardware technology. This is especially challenging when we want to have hand presence in VR while grasping and manipulating objects.
For example, when a user places the avatar hand close to an object and triggers the grasp button to initiate grasp interaction, he or she can not guarantee that the wrist is perfectly placed so that just closing fingers around the object can generate a natural-looking grasp configuration on the selected object. While in real life such a problem is trivial since we can always rely on our fast sensory-motor feedback loop to correct our hand and finger poses, in VR such a feedback does not exist.
VirtualGrasp fills in the gaps of lacking sensory-motor feedback, and uses a generative grasp synthesis algorithm to create immersive grasp interacting experiences in VR.
VG enables robust grasp interactions. Compared to many physics-based grasp synthesis solutions in the market VG takes a different approach by exploiting “object intelligence”. By analyzing shape and affordances of an object model in VR, we can synthesize grasp configurations on a hand with just the knowledge of where the wrist is, and without any dependence of expensive physical simulations. As a result,
- there is no dependency on accurate finger tracking controllers (see controllers), and
- users don’t need to spend a lot of cognitive load to carefully place the fingers around the object.
In this page we first describe the process of how VG creates object grasp interaction,
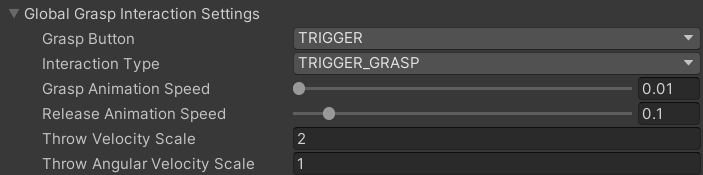
and then explain a set of parameters to configure and fine-tune the grasp interaction experiences in your VR application:
- Grasp Button
- Grasp Synthesis Method
- Grasp Interaction Type
- Grasp Speed and Release Speed
- Throw Velocity and Angular Velocity Scales
From Object Selection to Grasp Synthesis
In VR, grasp interaction consists of two consecutive processes:
- object selection, and
- grasp synthesis
VirtualGrasp provides an object selection mechanism through checking collisions between a grasp selection sphere attached to the hand and the objects, and choosing the “closest” object for grasping. Note this process is done in the VirtualGrasp library, and no collider setup or physical simulation is needed in any client engines.
And once an object is selected by a hand, it is ready for grasp synthesis.
Grasp Button
When a hand-held VR controller is used (as opposed to finger tracking devices), you can control which button on the controller to use for grasp triggering.
| Button | Description |
|---|---|
| TRIGGER | The trigger button will be used to trigger grasp. |
| GRIP | The grip button will be used to trigger grasp. |
| GRIP OR TRIGGER | Either the grip or trigger button can be used to trigger grasp. |
Grasp Synthesis Method
Grasp synthesis refers to the runtime process of creating hand grasp configurations – the wrist and fingers pose w.r.t the object – when an user triggers grasp with VR controllers. There are two alternative grasp synthesis methods – static grasp (SG) and dynamic grasp (DG). Static grasp is an easy alternative since it simply searches for the closest grasp configurations in a grasp database, and apply it to the hand. However it is also a very rigid approach so that each object can only be grasped in a few limited ways. Therefore, VirtualGrasp offers a much more advanced, flexible grasp synthesis method – Dynamic grasp – which compute the grasp configurations dynamically in runtime. To speed this process up to meet the runtime grasp synthesis requirement, we need to bake the object. The baking output of objects is a grasp database which will enable DG for any humanoid hands.
In the situations when you do want to grasp an object with a set of fixed ways, VG_GraspEditor can be used to add primary grasps into the grasp DB.
Grasp Interaction Type
As we mentioned in background section, when a user triggers grasp, the wrist may not be at a good pose w.r.t. the object. VG’s grasp synthesis algorithm will “correct” this “mis-placement” of wrist, and create a grasp configuration with a wrist pose different from the sensor pose at the moment of grasp triggering. Because of this difference, there are different alternative solutions to pose the object-hand grasp ensemble, which will create different user experiences:
| Interaction Type | Description | Considerations |
|---|---|---|
| Trigger Grasp | when user triggers grasp, hand moves to the wrist pose in the dynamically synthesized grasp configuration around the object. | since hand moves away from sensor pose, this could break hand-sensor immersions if synthesized grasp is far away. However since dynamic grasp is used, the distance is small. |
| Jump Grasp | when user triggers grasp, object jumps to the dynamically synthesized grasped position in the hand. | object directly moves upon grasp triggering, which may not be suitable for performing some tasks requiring physical stability (e.g. play a Jenga game). |
| Jump Primary Grasp | when user triggers grasp, object jumps to the statically synthesized grasp position in the hand, using the added primary grasp(s) in the grasp DB | using primary grasp(s) is needed particularly in situations when an object should be grasped in some particular ways (e.g. how to grasp scissors). Note: to use this interaction type, you should have added some primary grasps in to grasp DB through VG_GraspEditor. If no primary grasps added, interaction will fall back to Jump Grasp. |
| Preview Grasp | once user selected an object, the grasp configuration is previewed on the object, so that user can push the trigger button to pick up the object if the grasp is satisfactory. | since dynamical grasp synthesis is running at every frame when object is selected, it can result in low frame rate. |
| Preview Only | once user selected an object, the grasp configuration is previewed on the object, and the grasp trigger won’t take effect to pick up object. | since dynamical grasp synthesis is running at every frame when object is selected, it can result in low frame rate. |
| Sticky Hand | a fall-back solution when object is not baked, so the grasp configuration is directly taken from the hand pose at the moment of grasp triggering, as if the hand is sticking to the object. | this allows VR developers to setup the interactive behaviors through object articulation before baking objects. |
Grasp Animation Speed and Release Animation Speed
Grasp animation speed and release animation speed determines how fast the hand forms grasp and releases from grasp respectively, hence also significantly affect the user experiences when interacting with an object.
The unit of these values are in (second), so if grasp animation speed is 0.1, it means it takes 0.1 second starting from grasp triggering for the hand to form a complete grasp configuration on the object. If release animation speed is 0.1, it means it takes 0.1 second starting from release triggering for the hand to move from grasp configuration on the object back to its sensor pose.
Throw Velocity Scale and Throw Angular Velocity Scale
The two velocity scales allow you to scale up and down throwing power when an object is released from all grasping hands. Throw Velocity Scale is to scale how fast object translate, while throw angular velocity scale is to scale how fast object rotate.